レーダー (空対空モード)#
F-16C で最も重要なセンサーは AN/APG-68 火器管制レーダー (FCR) です。 AN/APG-68 は、全天候、コヒーレント、マルチモード、捜索追跡レーダーであり、プログラム可能なデジタルプロセッサーを使用して、空対空タスクにおいて優れた柔軟性を発揮します。 視界外戦闘 (BVR) と格闘戦 (ACM) の両方で使えるパルスドップラー能力、ルックダウン/シュートダウン能力を持つ. レーダーは、左右 60° 、上下 60° の範囲内の目標を探知、追跡できます。
FCR は探知・捕捉・追跡ができる、2つの基本的な空対空モードを備えています。
- Combined Radar Mode (CRM): 複合レーダーモード このモードは捜索に用いる空対空サブモードを複合しています。
- Air Combat Mode (ACM): 格闘戦モード このモードは自動目標捕捉に用いるすべてのモードを複合しています。
- Single Target Track Mode (STT): 単一目標追跡モード このモードは RWS もしくは ACM モードで目標をロックオンしたときに切り替わります。
- Expand Feature (EXP): 拡大機能
- IFF Interrogation: 敵味方識別尋問
レーダーを用いた空対空兵装の発射については以下の項で紹介します。
- 空対空機関砲
- AIM-9M/X
- AIM-120
まずは、複数のモードに共通する機能について触れ、装備や兵装ごとの特定の機能については後で紹介します。
空対空レーダー画面は、自機を画面の手前中央位置とした、標準的なBスコープ表示です。 すなわち、Bスコープ上に表示されるすべての目標は、自機の前方に存在しています。 自機に近い目標はスコープの下側に表示され、距離が離れるにつれてスコープ上側に表示されます。 自機の左右に存在する目標は、方位角にしたがってディスプレイの左右に表示されます。
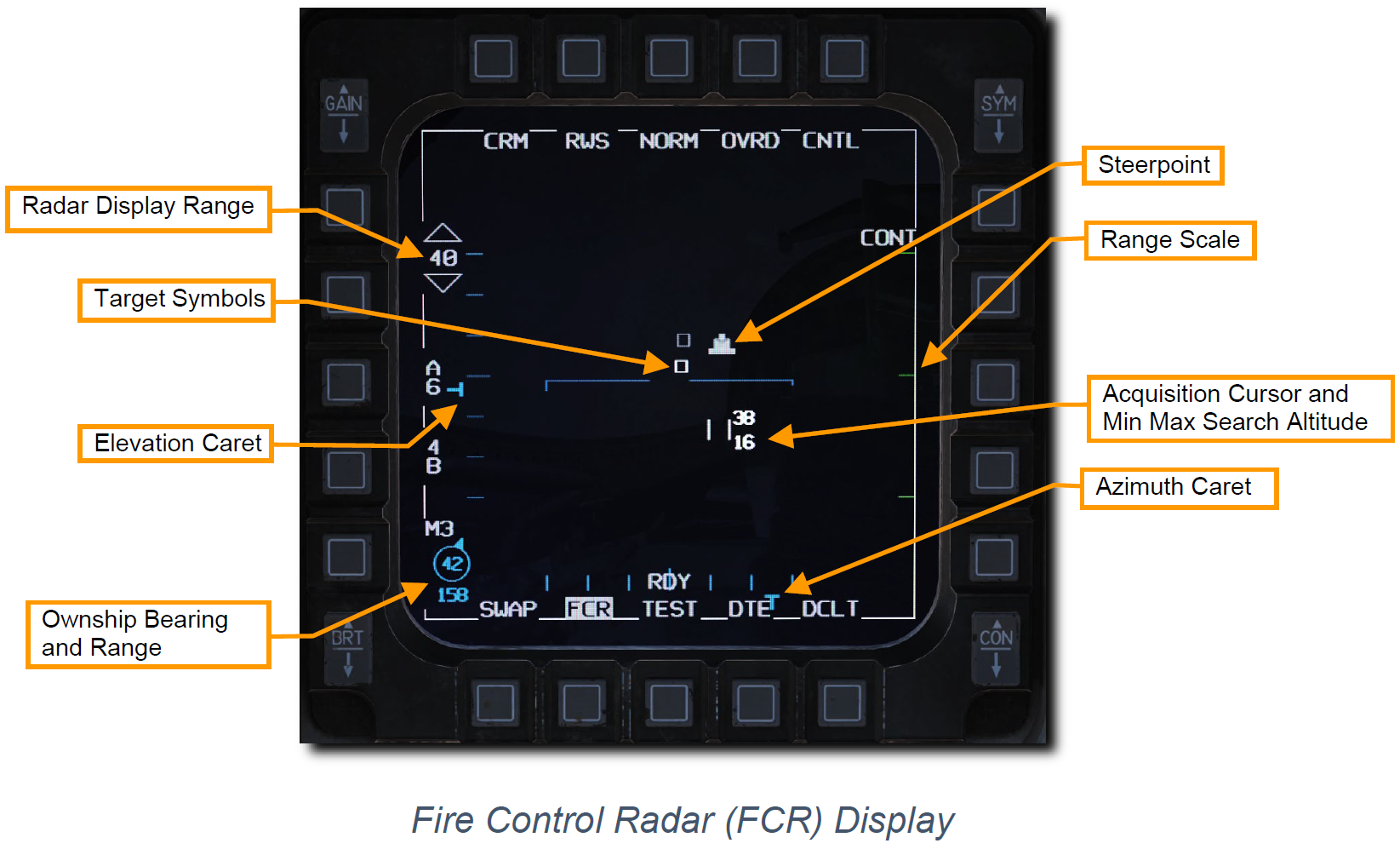
ディスプレイに表示される基本的な要素は以下の通りです。
- Radar Display Range (レーダーディスプレイ表示距離): ディスプレイの左には現在選択している MFD の表示距離があります。対応する OSB (Optional Select Button) を押すか、カーソルを上端もしくは下端に動かすことで、表示距離を拡大・縮小できます。
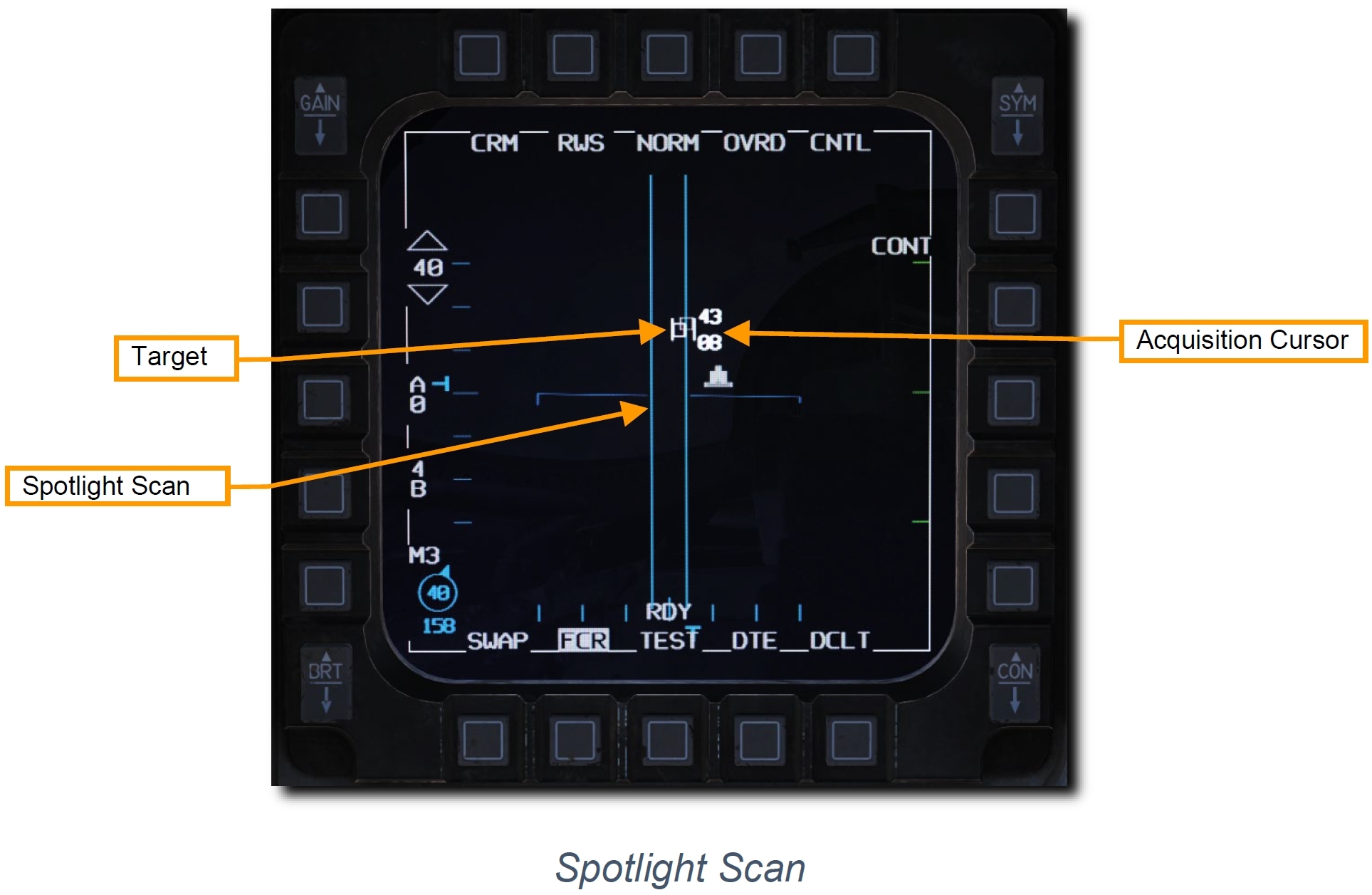
- Target Symbols (ターゲットシンボル): ターゲットシンボルは正方形で表示されます (Bricks)。シンボルの水平位置は自機正面からの角度を表し、垂直位置は自機からの距離を表します。
- Acuisition Cursor (捕捉カーソル): 2本の縦線で構成され、スロットルの CURSOR/ENABLE スイッチで操作できます。レーダーが捜索モードのとき、レーダービームが照射されている高度がカーソルの上下に表示されます。 ターゲットシンボルに重ねてから操縦桿の TMS 上を押すことで、目標をロックオンできます。
- Range Scale (距離目盛り): Bスコープの右側にはレーダーの表示距離が示されます。それぞれの目盛りは、レーダー表示距離の 1/4、1/2、3/4 を表します。
- Antenna Azimuth and Elevation Caret (アンテナ水平角/仰俯角符号): 現在のレーダーの水平角度は、ディスプレイの下端に、仰俯角度は左端に T で表示されます。符号は、アンテナの最大動作角度である ±60° の範囲で度盛りに沿って動きます。
- Ownship Bearing and Range (自機からの方位/距離): ブルズアイまでの自機からの方位と距離が表示されます。
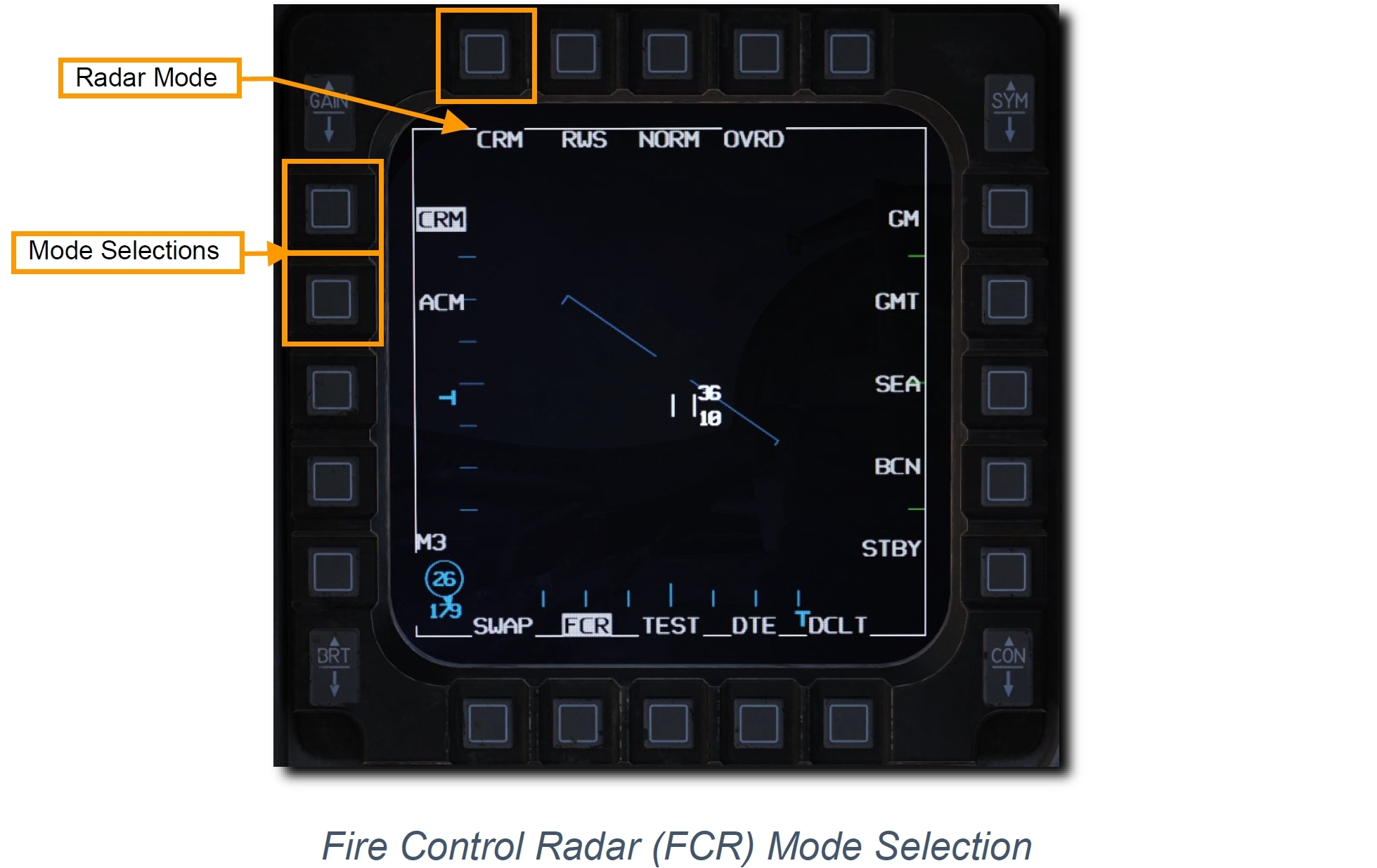
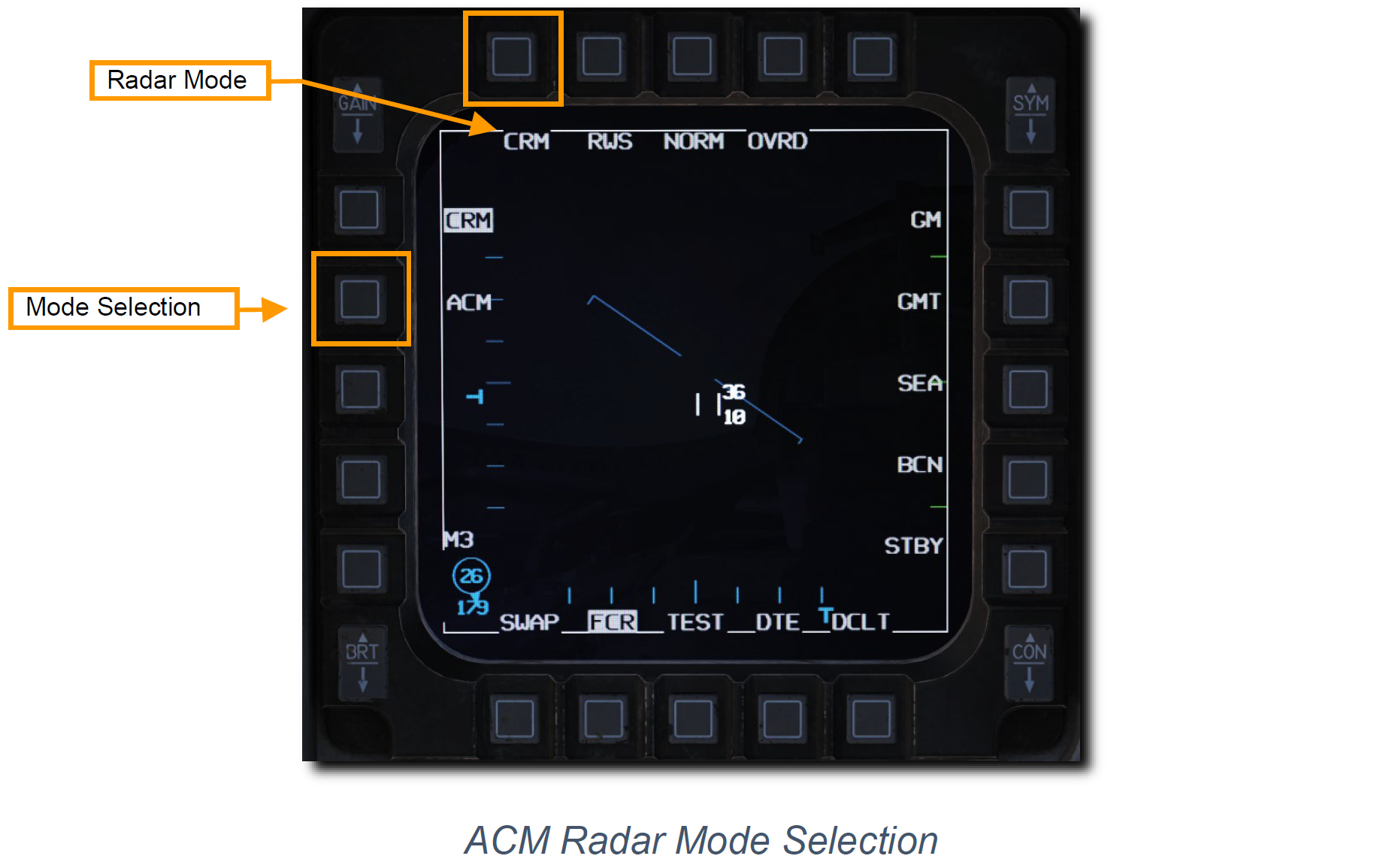
モードを選択するには、現在の表示に隣接する OSB を押します。 使用可能なすべての空対空モードのメニューは、画面の左側に表示されます。 目的のモードに隣接する OSB を押して選択します。
Combined Radar Mode (CRM): 複合レーダーモード#
このモードは、レーダー画面を選択したときのデフォルトとして表示されます。 パイロットの負担軽減のために捜索用のサブモードを複合した設計になっています。
- Range While Search (RWS): 捜索中測距
- Track While Scan (TWS): 走査中追跡
サブモード表示に隣接する OSB を押すと RWS と TWS が切り替わります。
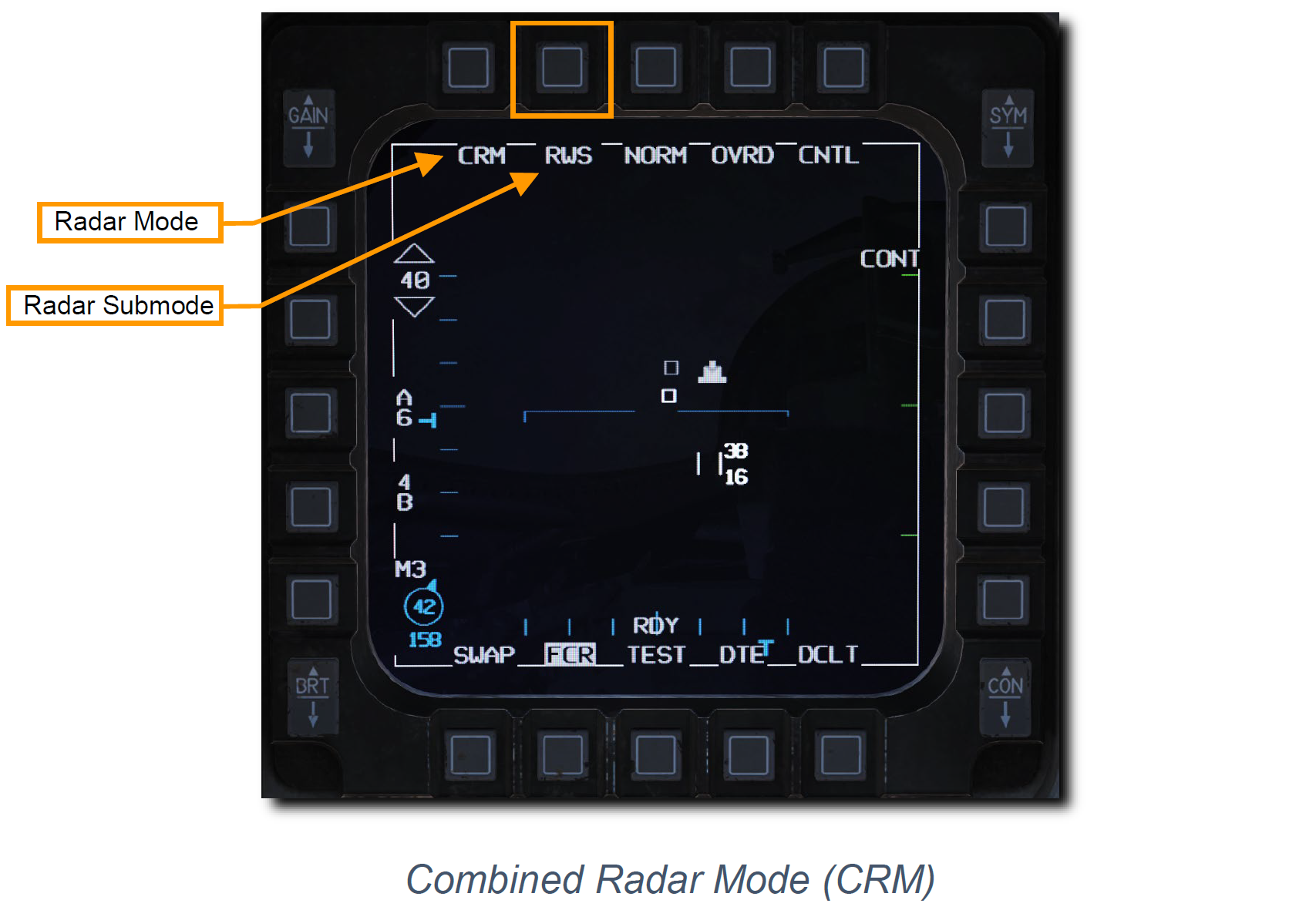
また、操縦桿の TMS 右を1秒以上長押しすることでも切り替えられます。

Range While Search (RWS): 捜索中測距サブモード#
捜索中測距 (RWS) サブモードは、長距離の捕捉と交戦に用いられます。 パイロットは表示距離を 10、20、40、80、160 海里から選択でき、加えてレーダーアンテナの水平角と仰俯角も変更できます。
目標は Situational Awareness Mode (SAM: 状況認識モード) と Single Target Track (STT: 単一目標追跡) のどちらかで捕捉 (ロックオン) できます。
Situational Awareness Mode (SAM) aquisition: 状況認識モード捕捉#
ターゲットシンボルにカーソルを重ねて TMS 上を短押しすることで目標をロックできます。 これを行うと SAM モードでのロックオンが実行されます。
ロックしている間、レーダーアンテナは最後に判明した目標の位置に向かって指向し、4バー、±10° のレーダービームが照射されます。
TMS 上を押したときにカーソルの下に目標がいない場合は、前の走査パターンに戻ります。
ロックが成功すると SAM モードに切り替わります。 目標の捕捉中でもエリア内のレーダーの走査は継続され、他の目標も表示されます。 この状態は、目標を "Designate: 指定" もしくは "Bugging: バグ" していると定義されます。
AIM-120 AMRAAM は、STT ロックではなくバグした目標にも誘導できます。
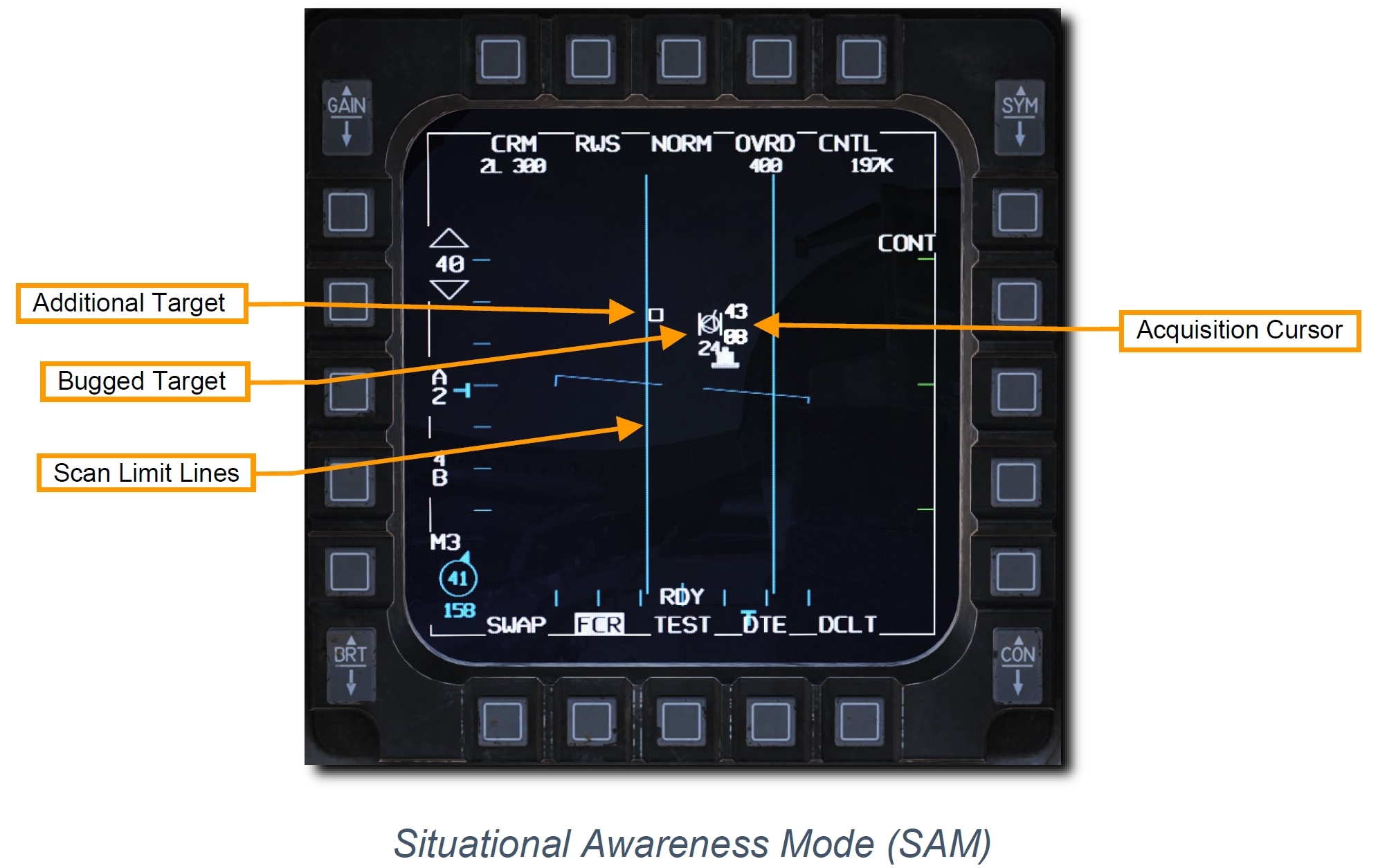
- Additional Target: 他の目標
- Bugged Target: バグした目標
- Scan Limit Lines: 走査範囲リミット
操縦桿の TMS 下を押すと SAM モードを解除できます。 SAM でバグした目標にカーソルを重ねて再度 TMS 上を押すと、その目標を STT モードでロックします。
Single Target Track (STT) aquisition: 単一目標追跡捕捉#
ターゲットシンボルにカーソルを重ねて TMS 上を素早く2回短押しすることで、目標をロックできます。 手順は SAM モードと似ていますが、捕捉できる目標は1つのみです。
レーダーはすべてのエネルギーを1機の目標に対して指向し、継続的な情報更新を可能にします。 しかし、このときレーダーは他の目標を探知できず、ロックされた目標はレーダーロックオン警報を受けることになります。
操縦桿の TMS 下を押すと STT モードを解除できます。 TWS 下を1回押すと、目標をバグした SAM モードに戻り、もう一度押すと RWS モードに戻ります。
このモードにの詳細ついては Single Target Track (STT) で紹介します。
Track While Scan (TWS): 捜索中追跡サブモード#
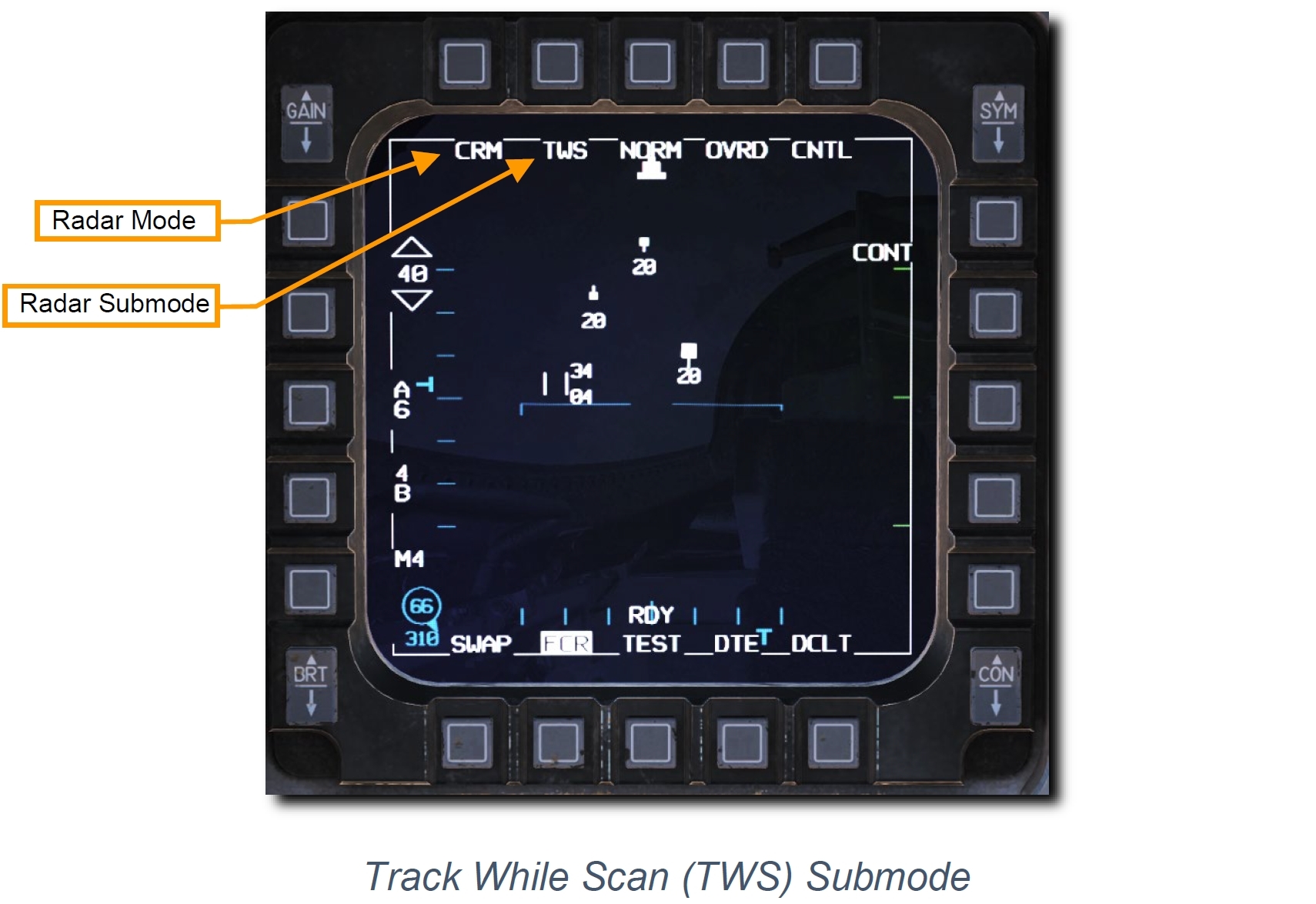
このモードは RWS と STT の特徴を併せ持ちます。 全般的に TWS の画面は RWS と類似していますが、それぞれのシンボルには針路を示す Vector Line と、その下に高度を示す数字が表示されます。 これにより、他の目標を探知するための走査を継続しながら、詳細な目標情報を取得できます。
TWS にはいくつかの制限があります。 レーダーはそれぞれの目標に対するトラックファイルを形成しようとしますが、走査範囲が広い場合は走査頻度が落ちます。 レーダーはそれぞれの走査間も、次の走査での目標の未来位置を予測します。 しかし、目標が高Gでの回避機動をとり軌道と速度が素早く変化すると、レーダーは誤ったトラックファイルを形成してしまい目標を失探する可能性があります。 Using such a defensive tactics、the hunter can quickly become the hunted.
TWS と AIM-120 を組み合わせると、強力で迅速な同時多目標同時交戦能力を発揮できます。 だが、TWS での目標追跡の信頼性は SAM よりも低く、STT と比べるとさらに低いです。 STT と異なり、TWS での AIM-120 発射は敵目標にレーダーロック警報とミサイル発射警報が行われません。 敵のパイロットが最初に警報を受けるのは、AIM-120 が目標に接近し、内蔵のアクティブレーダーシーカーを作動させたときです。
レーダーの掃引 (走査に合わせた画面上の表示) ごとの情報を元に、トラックファイルを10個まで形成します。 レーダー走査範囲設定は RWS と同じだが、目標をバグしたときは 3バー、±25° に制限されます。
目標の優先度に応じて、Search Target、Track Target、System Target、Bugged Target の4種類のシンボルが割り当てられます。
Search Target: サーチ (捜索) ターゲット#
トラックファイルを形成する十分な情報がない目標です。 RWS と同じく、小さな正方形として画面に表示されます。
レーダーの掃引によるトラックが得られなかった場合、これらの目標表示は消滅します。 2回の連続した掃引による有効なトラックが得られた場合、目標はトラックターゲットとなります。
Track Target: トラック (追跡) ターゲット#
針路を示す Vector Line をもつ、大きめの白塗りの正方形で表されます。 それぞれのシンボルの下にはその目標の高度が表示されます。 同時に10個までのトラックが形成されます。

トラックターゲットは基準的な目標シンボルの種類とみなされます。 目標がこの段階のシンボルになると、他のオプションが利用できるようになります。 目標は IFF 尋問により敵か味方かに判別され、トラックターゲットとして残ります。 より注意が必要な目標はシステムターゲットに変更できます。
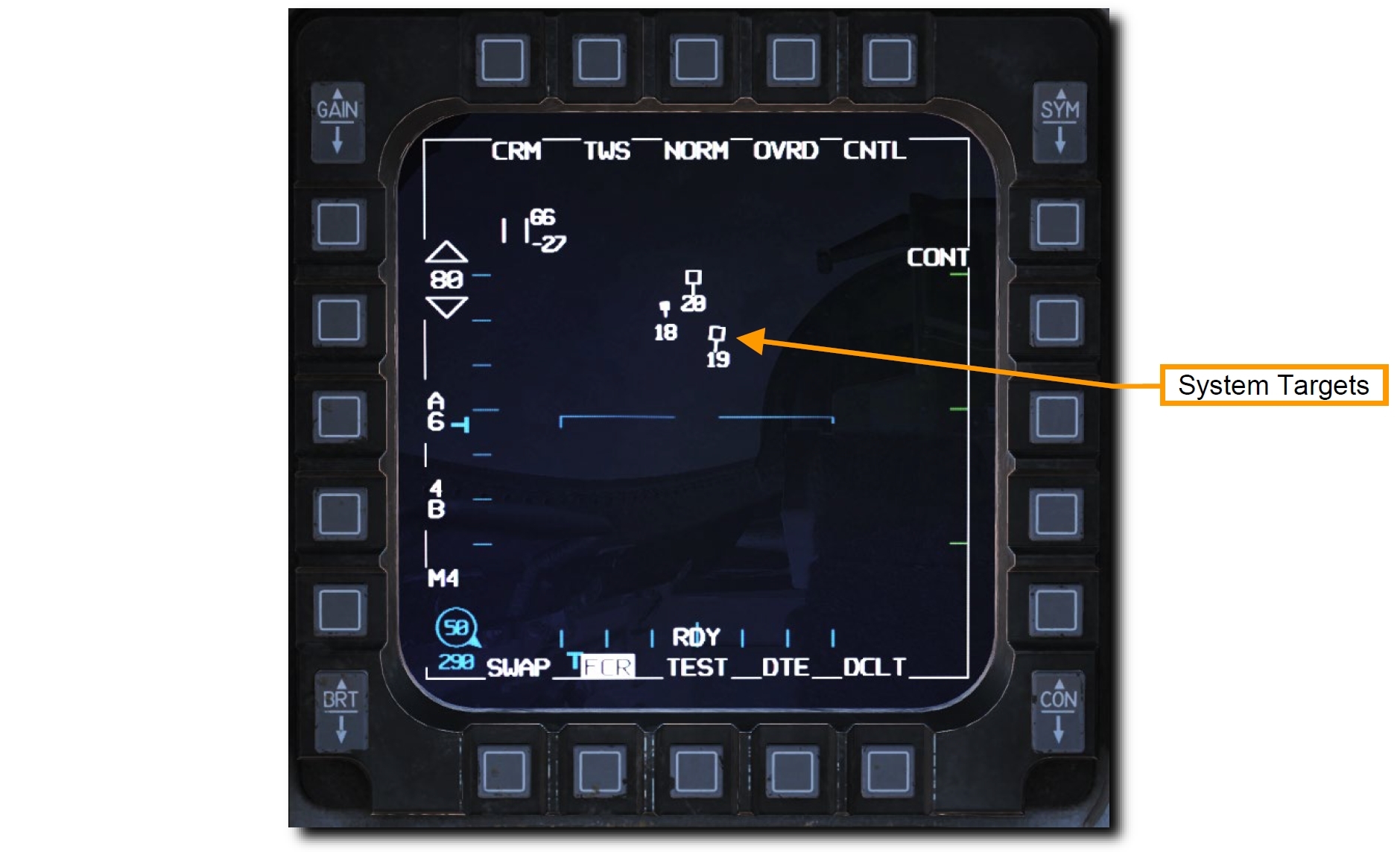
System Target: システムターゲット#
より重要なトラックターゲットとして識別を容易にしたい場合はシステムターゲットを用います。 Vector Line と高度を含む、空の正方形として表示されます。
トラックターゲットをシステムターゲットに以降する方法の1つは、レーダーカーソルをトラックターゲットに重ねて操縦桿の TMS 上を押します。 また、表示される他のシステムターゲットが無い場合に TMS 右を押すと、すべてのトラックターゲットがシステムターゲットに置き換わります。
カーソルをシステムターゲットの上に重ねると、その目標を Estrablishment (確立) できます。

この場合、その目標を中心に 3バー、±25° の走査に制限され、より高い更新頻度を可能にするとともにトラック失探の可能性を低減します。 AIM-120 の発射に用いることはできませんが、その目標に対するレーダー更新頻度を向上させられます。
カーソルを他のシステムターゲットに重ねることで、これを変更できます。 どのシステムターゲットにも重なっていない場合、レーダーは通常の走査に戻ります。
システムターゲットにカーソルを重ねて TMS 上を押すと、バグターゲットとして指定できます。 移行すると、バグターゲットを中心に 3バー、±25° の走査となり、より高い更新頻度を可能にするとともにトラック失探の可能性を低減します。
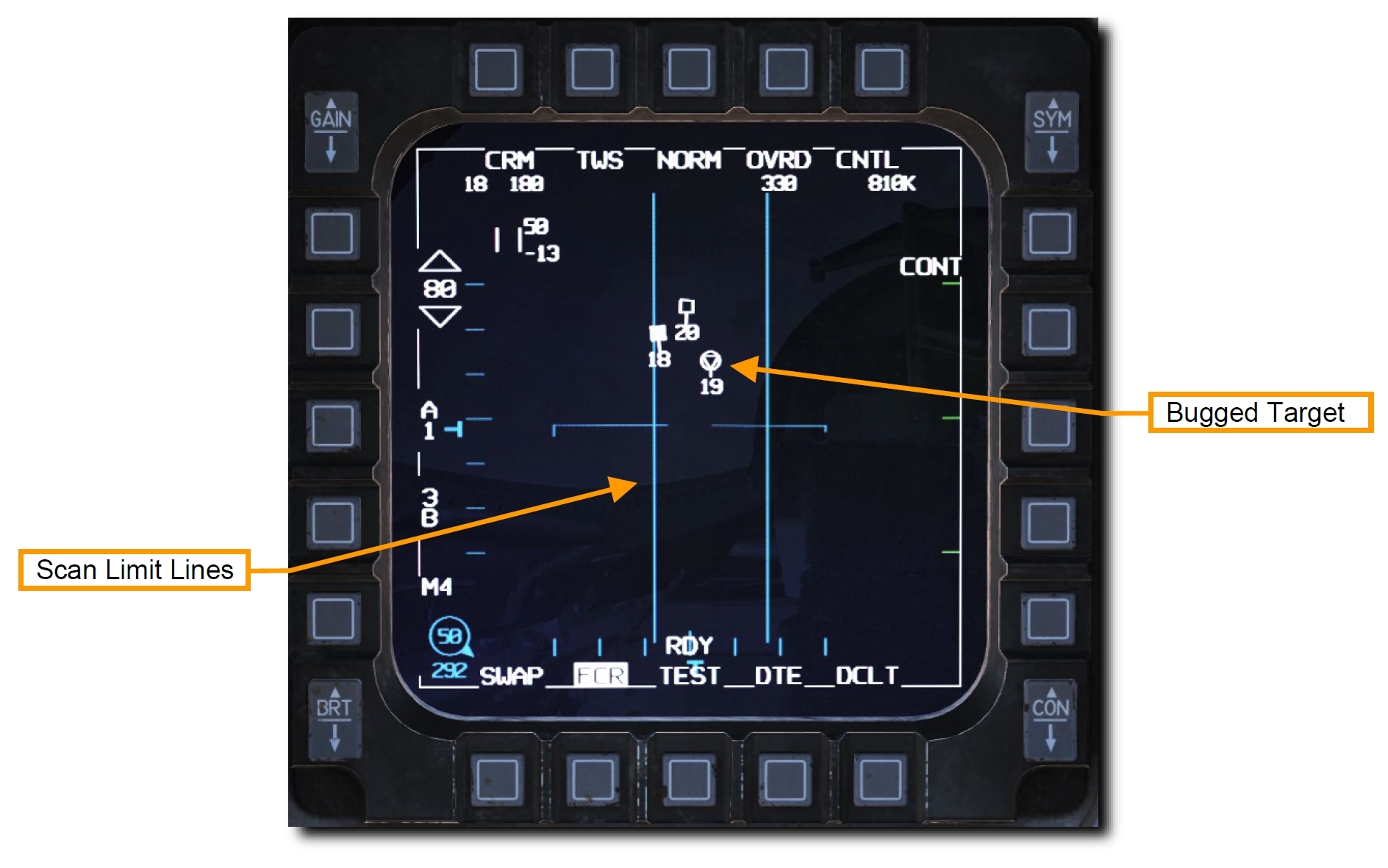
Bugged Target: バグターゲット#
すべてのトラックファイルのなかで最も高い優先度の目標であり、AIM-120 はバグした目標に誘導されます。 シンボルには円が表示されます。
TMS 右を押すと、最も近いシステムターゲットがバグターゲットに置き換わります。 続けて TMS 右を押すと、表示されているすべてのシステムターゲットが順番にバグターゲットに置き換わります。
これにより AIM-120 を用いた交戦手順は次のようになります。
- トラックターゲットのうち、交戦する目標をシステムターゲットに移行します
- 最も脅威度の高いシステムターゲットをバグし、ミサイルを発射します
- システムターゲットを順番にバグして、それぞれにいミサイルを発射します
さらに、レーダーカーソルをバグターゲットに重ねて TMS 上を押すと、STT 追跡に移行します。
STT から TWS モードに戻るには TMS 下を押します。 続けて TMS 下を押すごとに、トラックファイルの優先度が降格します。
Air Combat Mode (ACM): 格闘戦モード#
格闘戦モードでは、近くの航空機を自動的に捕捉します。 このモードは主に、目標が目視圏内に入ってから使用します。 パイトットは目標をレーダーで捕捉するために、適切な位置に機体を操縦しなければなりません。
異なる走査パターンをもつ4つのサブモードがあります。
- 30° x 20° (HUD Scan): HUDスキャン
- Boresite (BORE): ボアサイト
- 10° x 60° (Vertical Scan): 垂直スキャン
- Slewable
どのサブモードであっても、レーダーは最初に探知した目標をロックします。 ボアサイトモードの最大捕捉距離は 20 海里で、他のすべての ACM モードの最大捕捉距離は 10 海里です。 それぞれのモードには長所と短所があり、それぞれの状況において最大の効果を発揮します。
ACM モードに入る方法は次の2つです。
- スロットルの Dogfight/Missile Override (DOGFIGHT) スイッチを DOFT に倒す
- ディスプレイ左のレーダーモードから ACM に隣接する OSB を押す
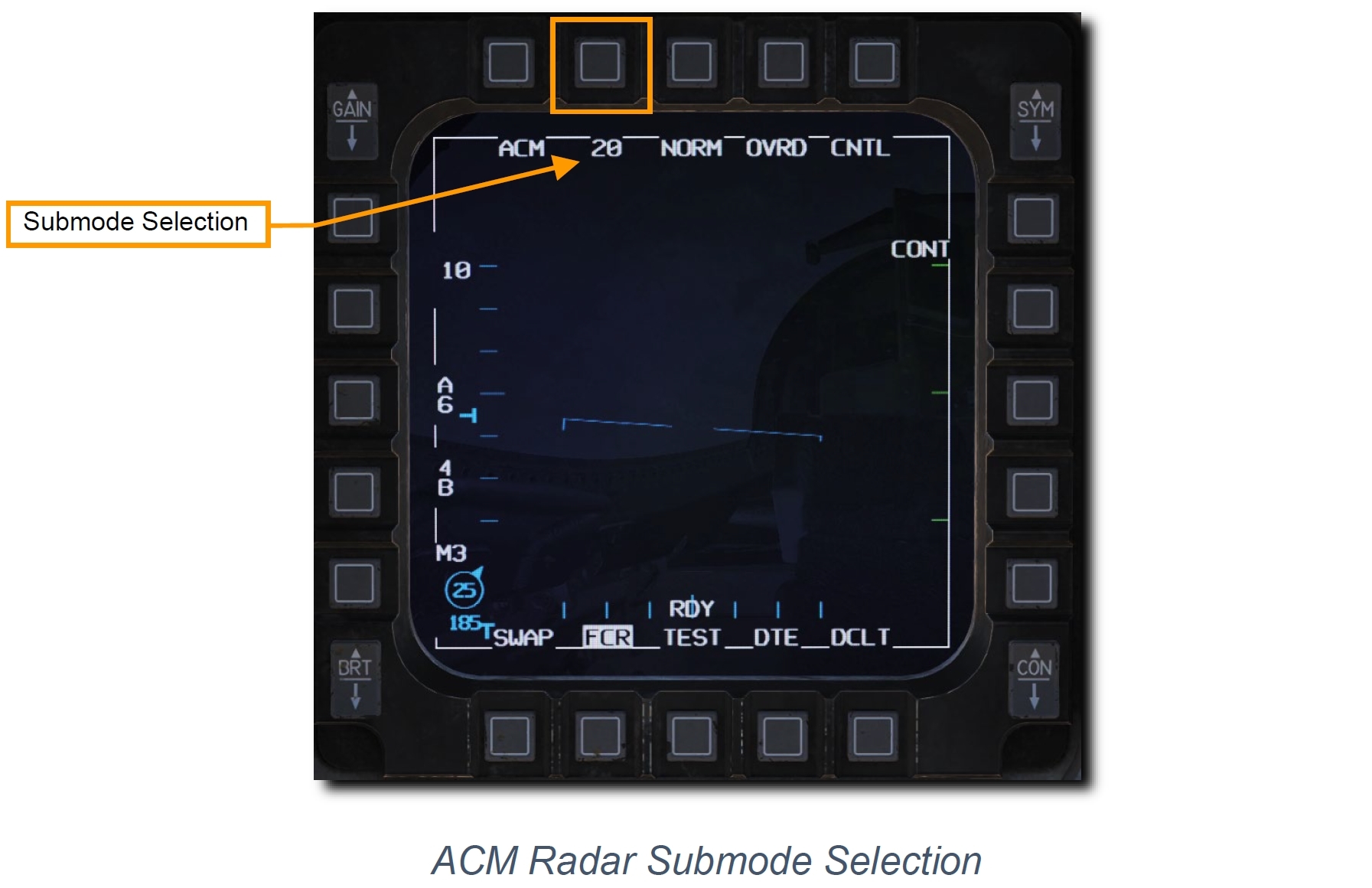
ACM モードに切り替えると、デフォルトで 30° x 20° (HUD スキャン) サブモードが 電波を放出しない状態 (NO RAD) で選択されます。 操縦桿の TMS か、MFD からサブモードを切り替えると、レーダーの電波放出が開始されます。
ACM モードでレーダー画面が SOI になっているとき、HOTAS の TMS は次のように機能します。
- TMS 上
- ボアサイトサブモード
- TMS 下
- 目標をロックしていない場合: 10° x 60° 垂直スキャン
- 目標をロックしている場合: ロック解除 + 30° x 20° HUD スキャン
- TMS 左
- 機能なし
- TMS 右
- 30° x 20° HUD スキャン
30° x 20° (HUD Scan): HUD スキャンサブモード#
30° x 20° HUD スキャンパターンは、HUD の視野角よりも少しだけ広い範囲を捜索します。 目標捕捉距離は 10 海里です。 レーダーは、この範囲内に入った最初の目標を自動的にロックします。 ロックすると、目標は自動的に STT モードで追跡されます。
このサブモードは特別な HUD シンボルをもちません。

このモードは、ボアサイトモードより精度が低くレーダーの捜索対象となる領域が広いため、目標のロックに時間が掛かる可能性があります。
Boresite (BORE): ボアサイトサブモード#
ボアサイトスキャンパターンは、HUD のガンクロスより下 3° の1回分のビーム幅の範囲を捜索します。 HUD にはレーダー捜索範囲を中心としたボアサイトクロスが表示され、目標にレーダービームを照射する目印となります。
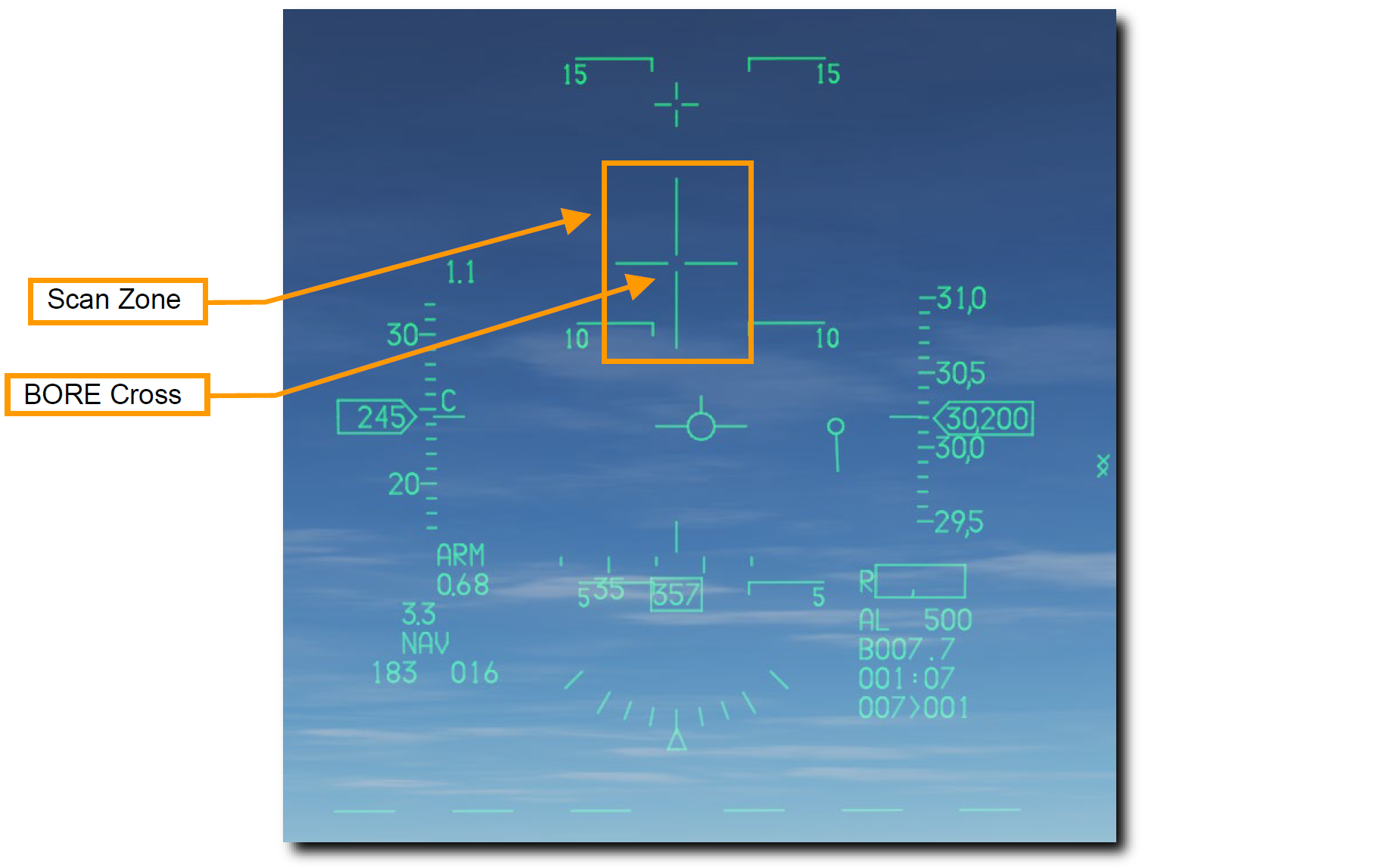
ボアサイトモードは、視界内戦闘 (WVR) での素早いロックに最適で、ロックされる目標をある程度細かく制御できます。 20 海里内の探知した最初の目標を自動的に STT モードで追跡します。
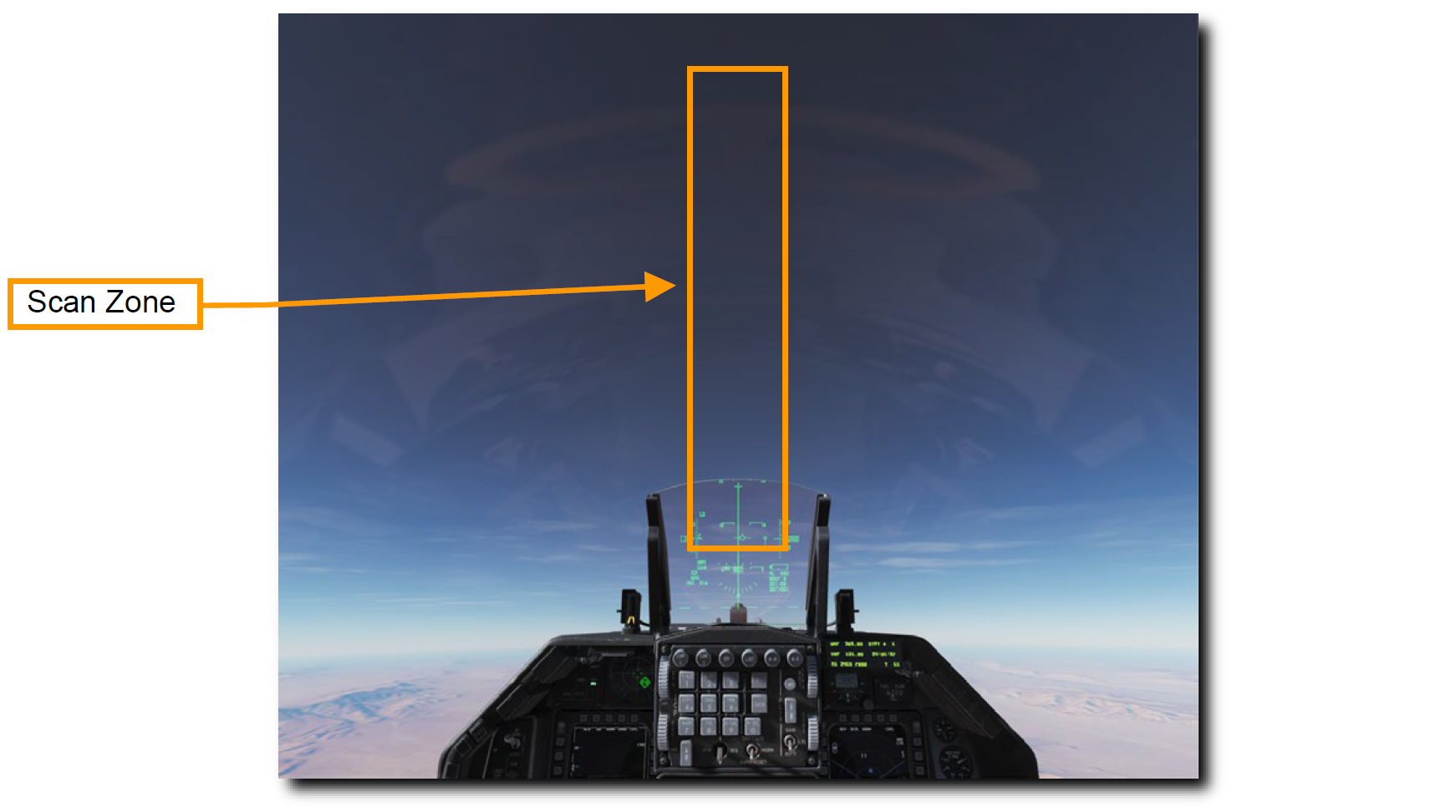
10° x 60° (Vertical Scan): 垂直スキャンサブモード#
10° x 60° 垂直スキャンサブモードでは、レーダーは幅 10 °、垂直 60° の範囲を捜索します。 走査の中心はガンクロスより 23° 上方です。 このモードでは、ガンクロスから HUD の下部に伸びる垂直線が表示されます。
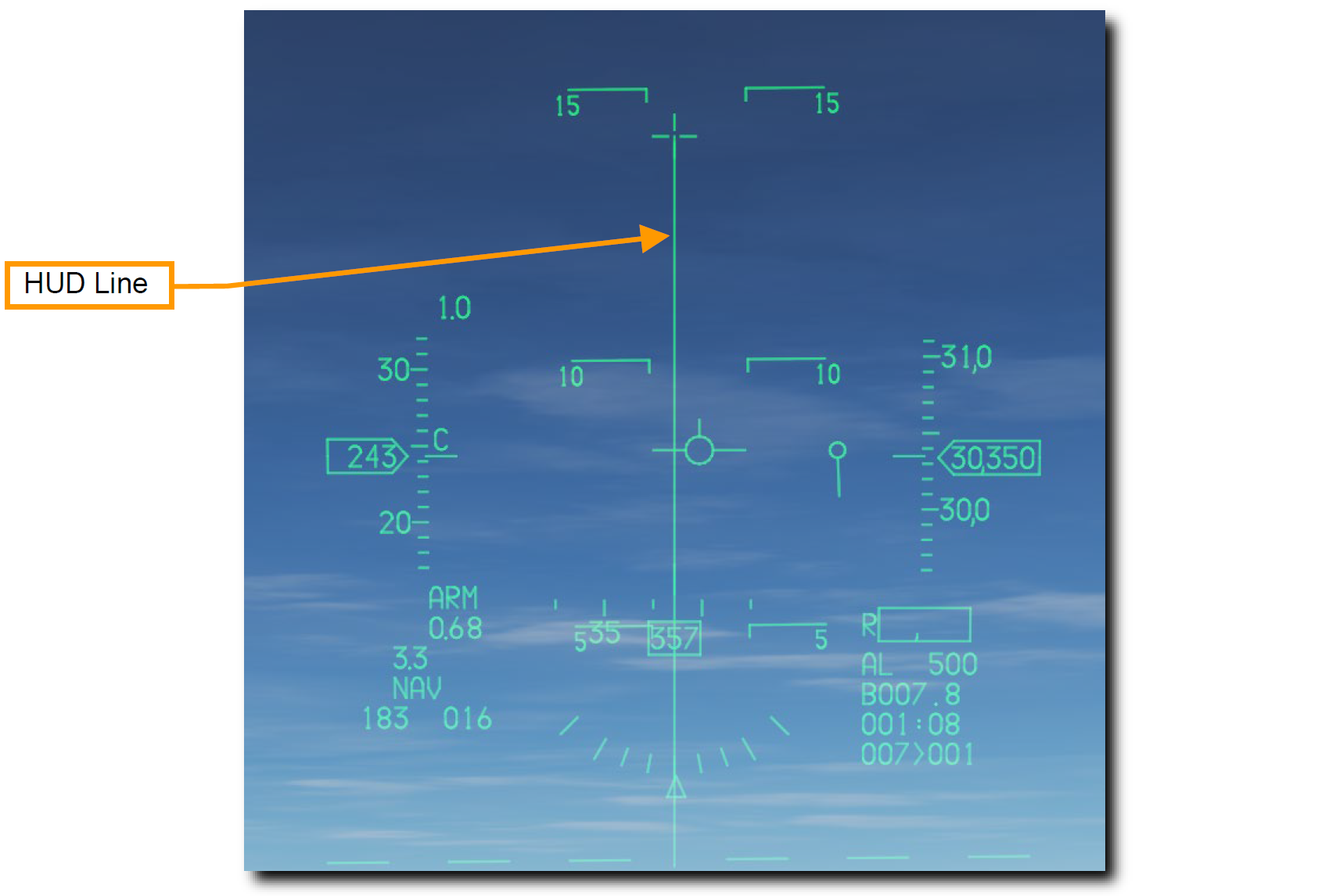
ロックできるのは 10 海里までの範囲です。 範囲内に入った最初の目標をロックし、自動的に STT モードで追跡します。
このモードは格闘戦において最も使用頻度が高いです。 ドッグファイトのとき、パイロットの頭上にいる目標を HUD 内に引き込もうと、操縦桿を引こうとします。 このモードであれば、HUD フレームよりずっと上方であっても目標を素早くロックできます。
Slewable: スルーアブルサブモード#
このモードの走査範囲はおよそ高さ 20° x 幅 60° です。 このモードが選択されると、走査は機体正面の水平線上で行われます。 スロットルの CURSOR/ENABLE スイッチで、この範囲をスルー (移動) して目標をロックします。 スルーできる範囲は、レーダーアンテナが可動できる限界域までです。
他のモードと同様、範囲内に入った最初の目標を自動的にロックし、STT モードで追跡します。
このモードは、"敵機が2時方向 上方" というような目視では確認できていない状況において、直接ロックしにいくのに向いています。
Not Implemented in DCS
早期版では未実装
Single Target Track Mode (STT): 単一目標追跡モード#
RWS か ACM サブモードで目標をロックした後、レーダーは STT モードに切り替わります。
レーダーはすべてのエネルギーを1機の目標に対して指向し、継続的な情報更新を可能にします。 しかし、このときレーダーは他の目標を探知できず、ロックされた目標はレーダーロックオン警報を受けることになります。
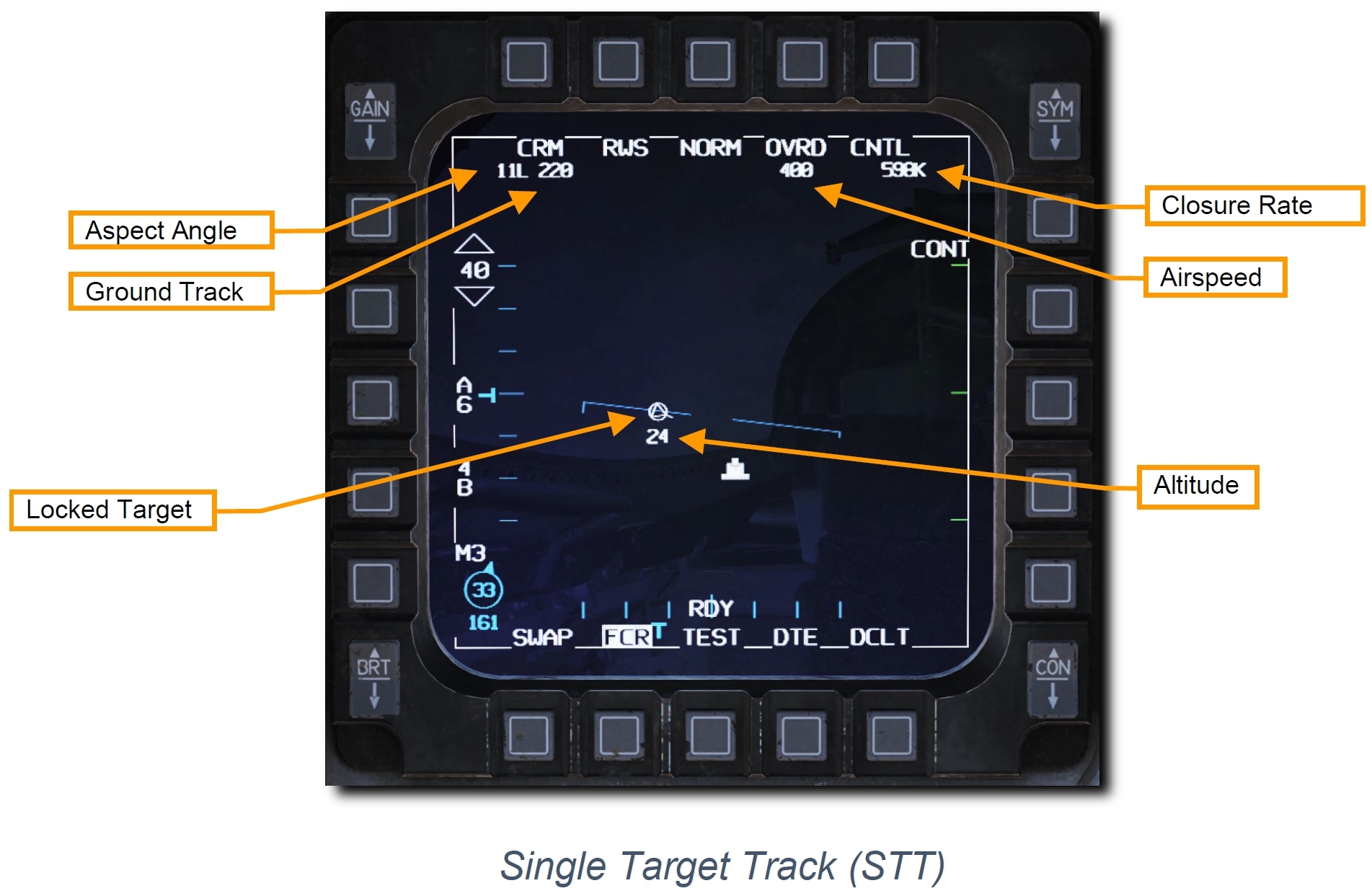
STT モードでの MFD 画面のほとんどは RWS モードのときと似ているが、次の違いがあります。 Locked Target (捕捉目標) は、飛行進路を表す Vector Line を含む、円で囲まれた三角形で表示されます。 シンボルの下には Target Altitude (目標高度) が表示されます。 画面の上部には Aspect Angle (アスペクト角)、Ground Track (磁気針路)、Airspeed (目標速度)、Closure Rate (接近率) が表示されます。
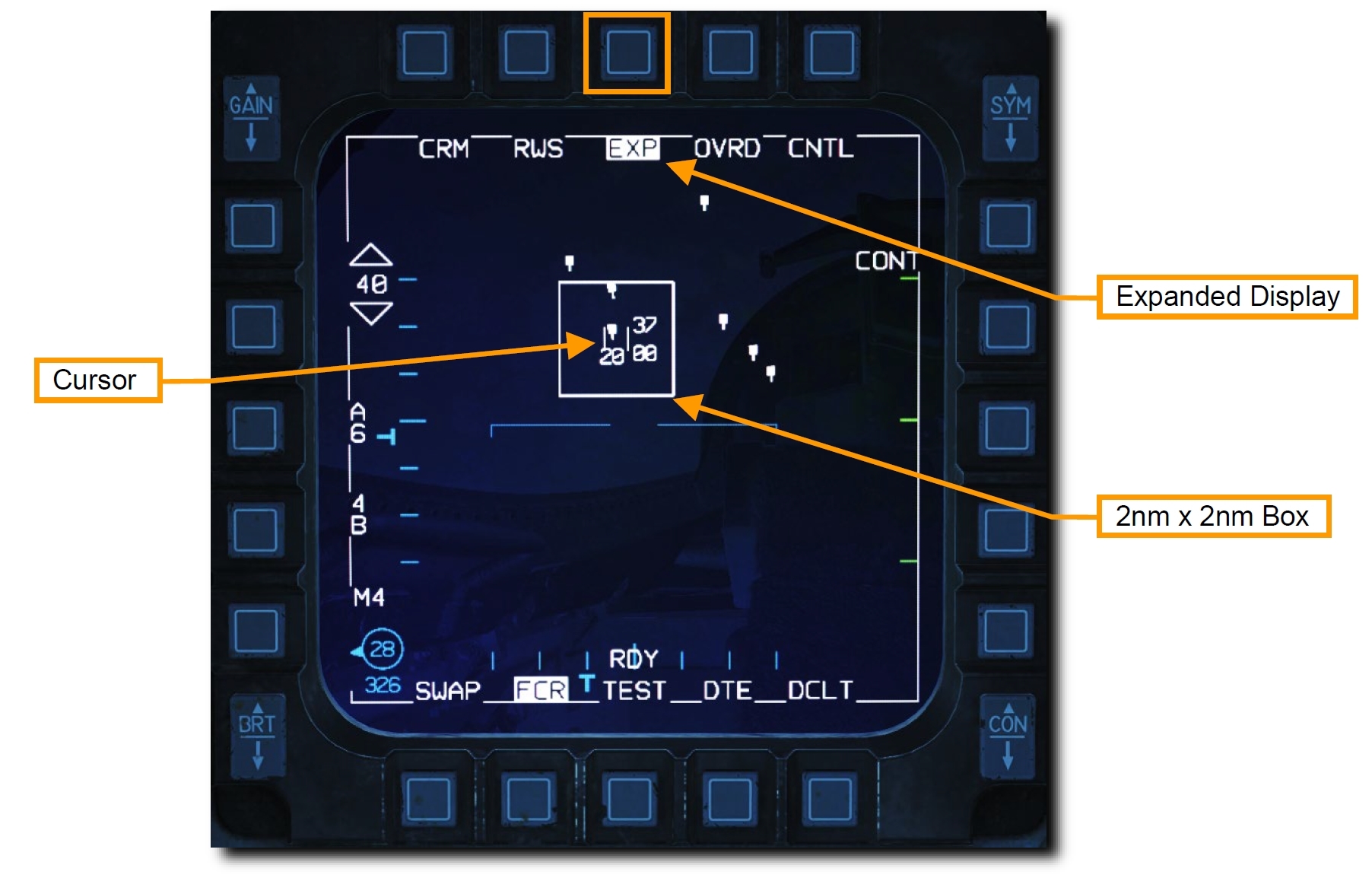
Expand Feature (EXP): 拡大機能#
レーダーは、近接した目標グループに対する判別と分解能を高めるために、視野角を拡大することができます。 これは、レーダーカーソルを中心とした4倍の拡大機能として扱われます。 この機能はレーダーのすべてのモードにおいて使用できます。
レーダー画面が SOI のときに、操縦桿の Expand/FOV Button (拡大/視野角変更ボタン) もしくは MFD の NORM/EXP の文字に隣接する OSB を押すことで拡大機能を切り替えられます。
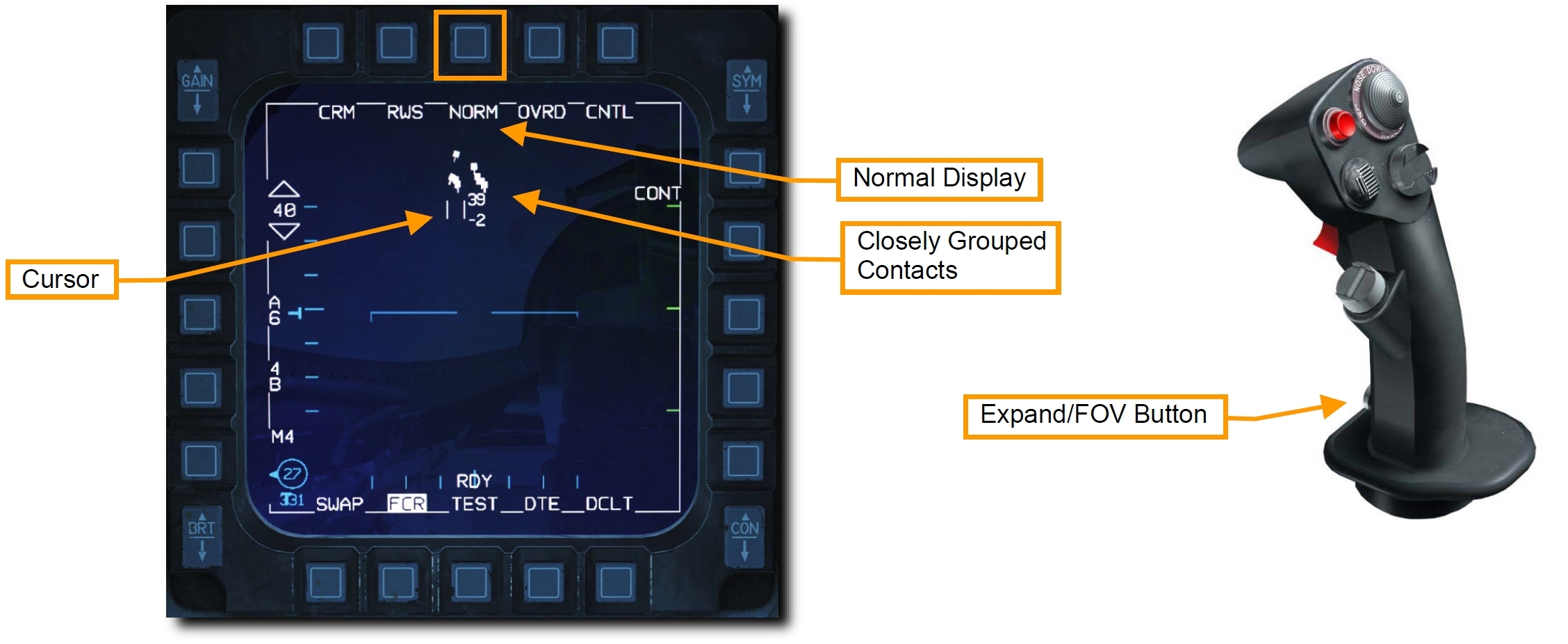
カーソルを中心とした 2 x 2 海里の範囲を拡大します。 その他の基本的な機能とシンボルは通常の画面と変わりません。
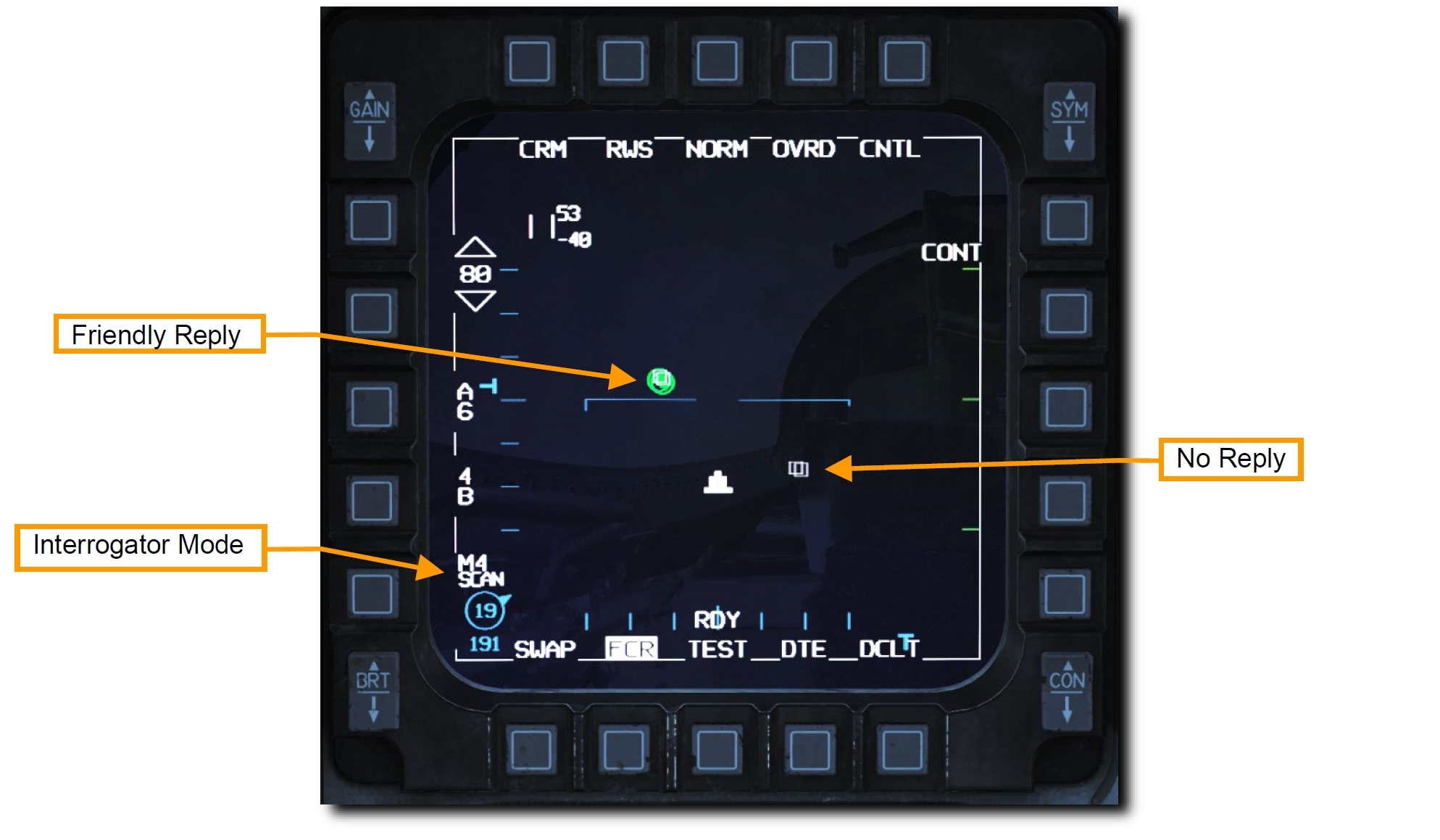
IFF Interrogation: 敵味方識別尋問#
敵味方識別 (IFF) システムは、航空機が友軍であるか敵機であるかを判別する尋問を行います。 これは、レーダービームの水平角と仰俯角によって選択された範囲もしくはレーダーで探知した特定の目標に対して、シグナルコードを送信することで実行されます。 友軍機であれば搭載されたトランスポンダーが正しいコードで応答します。
目標は、この応答によって分類され、レーダー画面に友軍もしくは敵機として表示されます。 IFF システムはレーダーに依存しないため、レーダーがオフであっても尋問を行うことができます。
IFF 尋問を有効にするには、IFF パネルのマスタースイッチを NORM もしくは LOW にする必要があります。

尋問は2通りの HOTAS 入力によって行うことができます。
- Scan (スキャン): TMS 左を1秒以下で短押ししすると、レーダー走査範囲のすべての目標に対して尋問を行います。
- Line of Sight (LOS: 見通し線): TMS 左を1秒以上長押しすると、ロックした目標もしくはレーダーカーソル周辺の目標に対して尋問を行います。
目標が友軍機であれば、シンボルを囲む緑色の円が3秒間表示されます。 応答が無い場合はディスプレイには何も現れず、目標は正体不明機と分類されたままです。 この場合、目標は現在の作戦の交戦規定 (ROE) 上の敵機であると推定される可能性があります。